

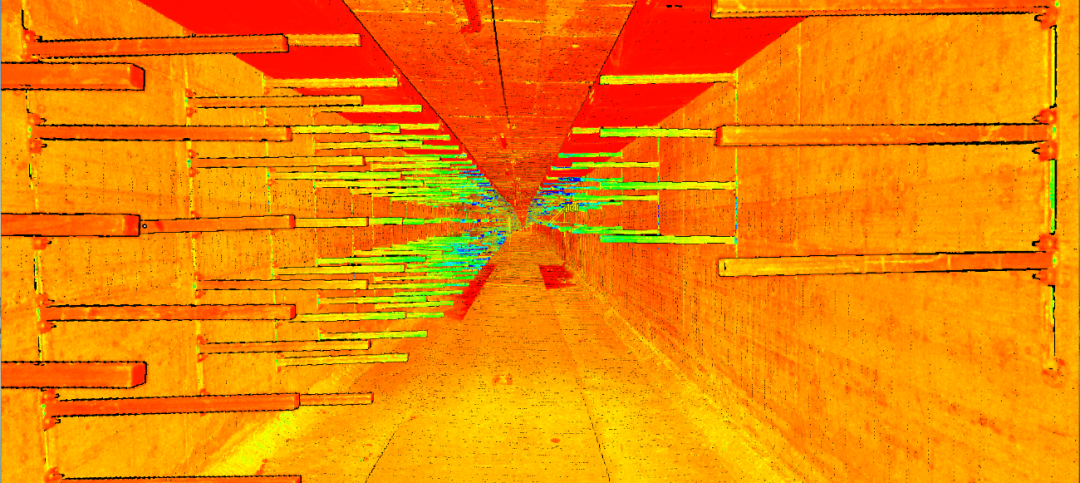
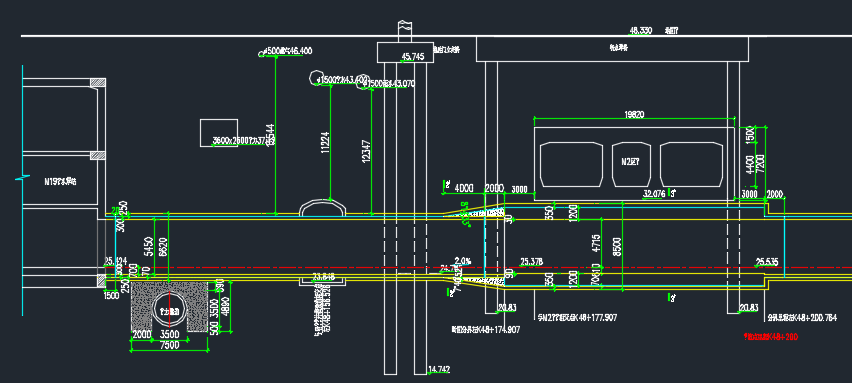
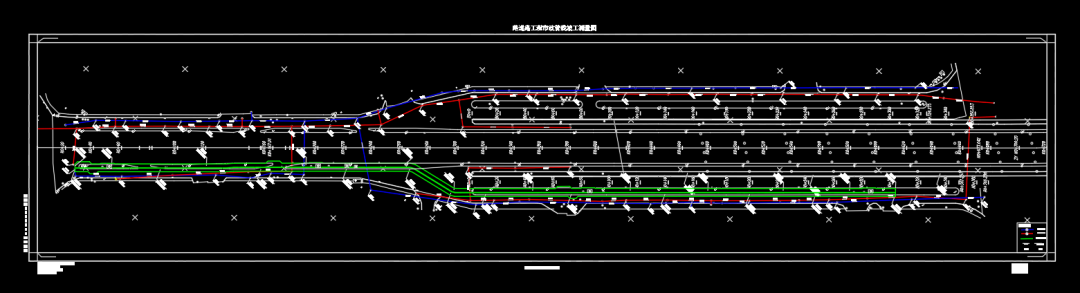
三维激光扫描技术在管廊检测中的应用
发布日期:2023-01-30
阅读量:805
收藏:

应用案例
当前位置:
首页>
应用案例
关注我们


微信公众号
关注我们
微信公众号